

2018年11月17日(予選・本選)18日(決選)に日本文理大学・湯布院研修所を会場として開催された「第3回森のドローン・ロボット競技会」で見事企業賞(マルマタ賞・マルマタ林業株式会社)をいただきました.
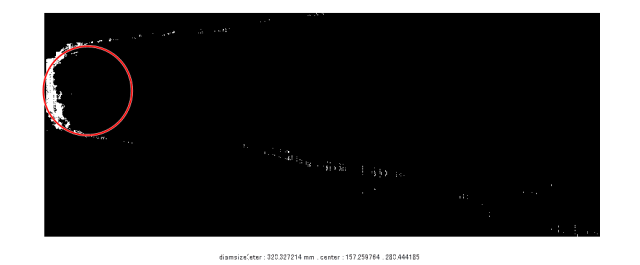
ここで使われた技術の1つに「カメラを用いた計測」があります.人が「物体や空間」を3次元で認識できるのは「両目」による「視差」があるからです.これは「測量」でも用いられる技術です.単眼(1台のカメラ)でも「ピントを合わせる」ことができ「大まかな距離」がわかりますが,複眼(複数のカメラ)を使うと「差」の情報を使うことができます.
ここでの課題は,1)ドローンに搭載できる装置は総重量で400g以下でなければならない,2)カメラのレンズおよびCCD(光をディジタルデータに変換するデバイス)は個体差がある,3)競技規定で競技10分+15分以内に計測結果を出さなければならない,の3点です.そこで1台のWebカメラ(単眼)を「2台のカメラ」にすることで,1)2)の解決を考えました.2)は「同じカメラならば個体差が等しい」かつ1)は装置個数が少なければ軽い,ということに気付いたからです.
そこで,積載最大重量400gをどう使うかを設計します.計測システムは,1)カメラ,2)画像処理装置,3)駆動バッテリ,が必要です.システムの消費電力は処理数が多ければ処理負荷が高くなり上昇します.処理数は取得される画素数が主要な要因となります.そこでここではWebカメラの中でも100万画素程度のものとし,処理装置もモバイルバッテリ駆動可能なSoC(System on Chip(組込みシステムで良く使われています))としました.
予選,本選で計測システムの実践的検証を行いました.予選では「計測」が競技項目に入っていませんが,続く本選および決選を考えて予選フライトでシステムの検証を行いました.その結果を続く本選に反映し,予選と本選の結果を翌日の決選に反映します.ここでの検討結果から,1)パイロットへのリクエスト(どういう計測が必要かを説明しパイロットのフライトプランに盛り込んでもらいます),2)決選フライト後の流れと想定外の事態が発生した場合のバックアッププラン,3)翌日までに行う内容,を決定し,メンバが個々の役割を責任を持って取組みました.その成果が受賞につながりました.
しかし競技会への取組みはこれでは終わりません.
技術は「安心して使える範囲」を明らかにしなければ「他の人に提供」できません.そこで,決選フライトで「スコアが取れたかどうか」でおわりではなく,次を担う人に「今回の取組みで創り上げた技術を伝承」しなければなりません.これは「競技会だけでなく利活用できる分野に技術提供する」ために重要なことです.
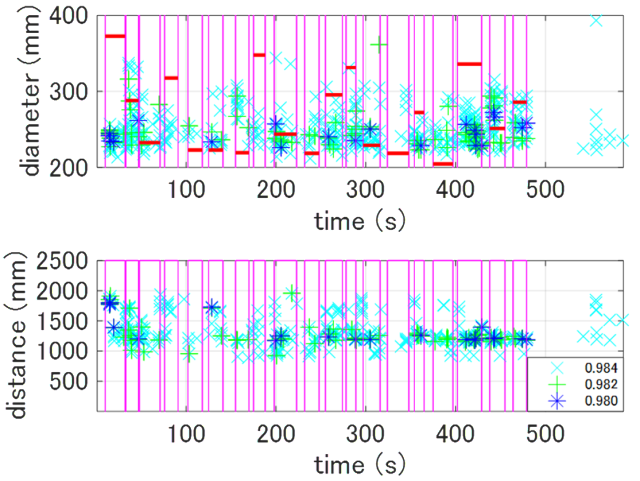
そこで,競技会で収集したデータをじっくり振返りました.良いデータが出たかどうかではなく,設計が妥当であったか,実装が妥当であったか,精度がどうであったか,検討「できる」項目に何があるのか,等々をしっかり振返り「1つの技術」として「提供可能」にする努力を行いました.
その成果は卒業研究(第1部審査会が12月6日(木)に開催されます)の中でも報告されるので,興味のある方は是非ご参加ください.(審査会は公開しております)

 0120-097-593
0120-097-593